
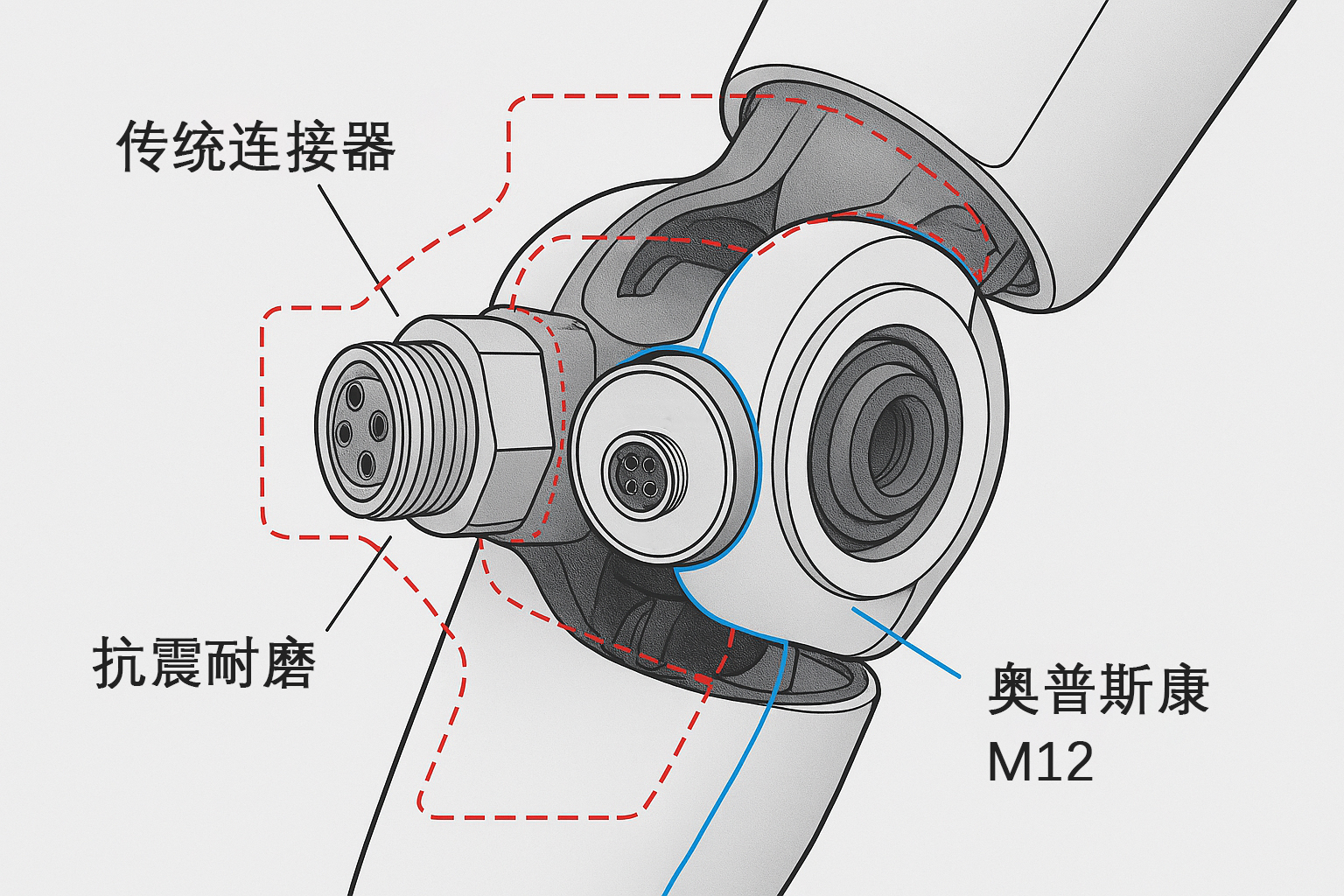
在人形机器人产业飞速发展的当下,关节部位的连接技术始终是制约其精度与稳定性的核心瓶颈——频繁弯折、狭小安装空间、信号与动力协同传输需求,让传统连接器难以实现感知-执行的无偏差闭环。奥普斯康(OCTOPUSCONN)深耕工业连接器领域13年,凭借技术沉淀与场景化创新,推出定制化M12连接器解决方案,成功破解这一行业痛点,为人形机器人关节连接提供稳定可靠的核心支撑。
人形机器人关节轴向空间通常不足15mm,传统连接器体积过大,无法实现紧凑安装,且易与其他部件发生干涉。
关节高频弯折(每秒可达10次以上)易导致连接器线缆断裂、信号中断,传统产品振动下端子位移超0.3mm,无法满足精准控制需求。
关节部位需同时实现传感器信号采集、电机动力供给,传统连接器易出现信号干扰或动力损耗,导致感知与执行不同步。
作为集研发、生产、销售、服务于一体的国家级高新技术企业,奥普斯康依托20+项设计专利与专业研发团队,针对人形机器人关节特性定制M12连接器解决方案,实现三大核心突破:
采用推拉耦合结构,轴向插拔空间仅需10mm,完美匹配人形机器人关节的安装限制。外壳选用高强度PA66+玻纤材质,整体直径控制在12mm以内,重量较传统连接器减轻30%,既避免部件干涉,又降低关节负载。
核心部件采用铜合金镀金工艺,接触电阻≤3mΩ,搭配防松螺纹设计,经实测在15g振动环境下端子位移≤0.1mm,满足关节高频运动需求。线缆选用耐弯折专用材质,可承受100万次以上反复弯折无断裂,使用寿命较行业平均水平提升2倍。
创新采用信号-动力分离设计,A/D编码款支持传感器高频信号传输(屏蔽效能≥85dB),有效避免电磁干扰;S编码款承载15A额定电流,保障电机动力稳定供给。两者协同实现感知信号与执行指令的同步传输,闭环误差控制在±0.02mm以内,真正做到零偏差响应。
13年行业深耕、20+研发团队、1000+全球合作客户验证,奥普斯康以技术创新破解连接难题,用品质保障赢得市场信赖。目前,公司M12连接器已广泛应用于工业机器人、智能装备、新能源等领域,为客户提供从原型到批量生产的一站式连接解决方案。
如果您正面临人形机器人关节连接的技术瓶颈,欢迎联系奥普斯康获取定制化方案与样品测试!
全国服务热线
+86 18925497513
官方邮箱
sale@octopusconn.com
企业地址
东莞市长安镇沙头东大路1号时代云谷611室
官网地址
https://www.octopusconn.cn/


